
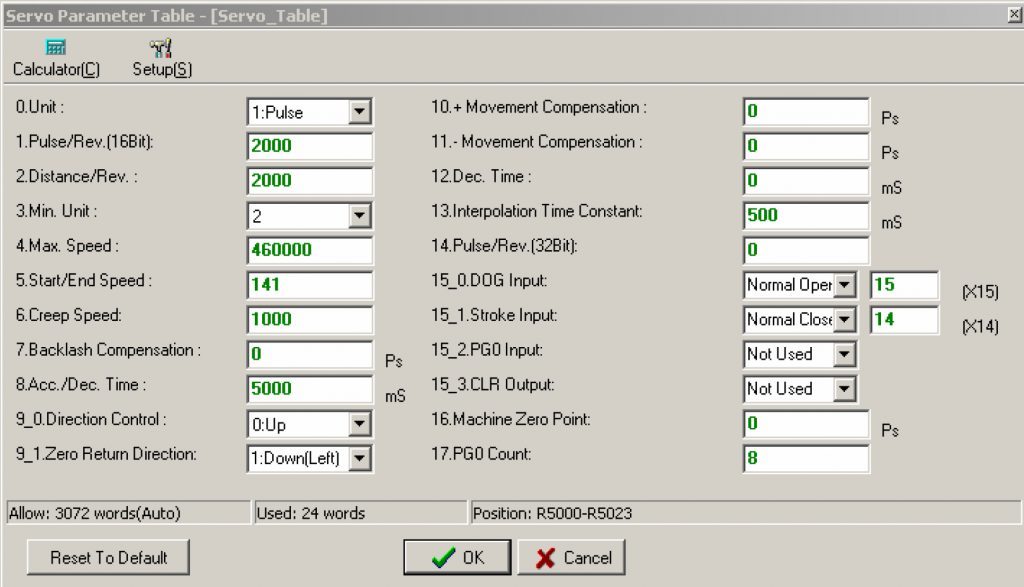
Opis parametrów:
Parametr 0: Ustawienie jednostek (w jakich podawane będą prędkości i skoki), domyślnie 1.
Gdy ustawiono wartość 0 – skok ruchu i prędkość w programie pozycjonującym będą podawane w jednostkach mechanicznych (mm ; cm/s,0.1” ; ”/min,deg ; deg/min x10 itp).
Gdy ustawiono wartość 1 – skok ruchu i prędkość w programie pozycjonującym będą podawane w pulsach i pulsach/s [Hz].
Gdy ustawiono wartość 2 – skok ruchu w programie pozycjonującym będzie podawany w jednostkach mechanicznych (mm, 0,1”, stopniach, itp.), natomiast prędkość będzie
podawana w pulsach/s [Hz].

Parametr 1: Liczba pulsów na jeden obrót silnika, domyślnie 2000.
Liczba pulsów jaką musi wysłać sterownik aby silnik obrócił się jeden pełny obrót.
Zakres 1~65535 (format 16-bit bez znaku).
Gdy Parametr 14=0 – jako liczbę pulsów na obrót brany jest Parametr 1.
Gdy Parametr 14>0 – jako liczbę pulsów na obrót brany jest Parametr 14 (format 32-bit bez znaku) a Parametr 1 jest ignorowany.
Parametr 2: Droga na jeden obrót silnika, domyślnie 2000.
Droga jaką pokona oś gdy silnik wykona jeden obrót. Należy wpisać wartość w 0,001 używanej jednostki mechanicznej, np.:
– 25 mm/obr – 25000
– 7,5 mm/obr – 7500
– 32,45 deg/obr – 32450
Da powyższe parametry pozwalają sterownikowi obliczyć jaką liczbę pulsów ma wysłać aby oś zmieniła swoją pozycję o zadany skok.
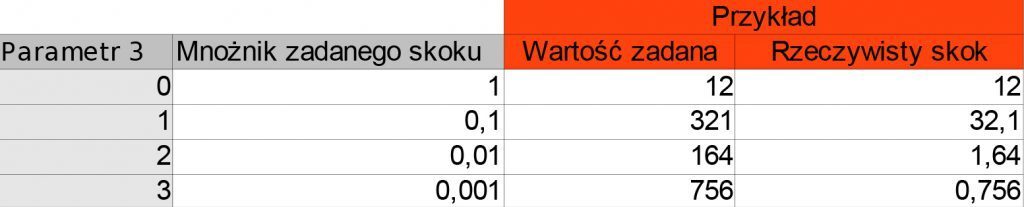
Parametr 3: Rozdzielczość zadawania skoku, domyślnie 2.
Wartość parametru decyduje o tym w jakiej części jednostki mechanicznej zadawane będą skoki (dotyczy sterowania w jednostkach mechanicznych i mieszanych).
Parametr 4: Maksymalna prędkość stosowana w aplikacji, domyślnie 460000.
Dla jednostek mieszanych i pulsów – pulsy/s [Hz]
Dla jednostek mechanicznych – cm/min, 10xDeg/min, cal/min, itp. Zauważ,że prędkość jest w jednostkach 10x jednostka mechaniczna/min.
Prędkość przeliczona na pulsy/s nie może przekroczyć maksymalnej częstotliwości danego wyjścia dyskretnego. Częstotliwość tą przelicza się ze wzoru:

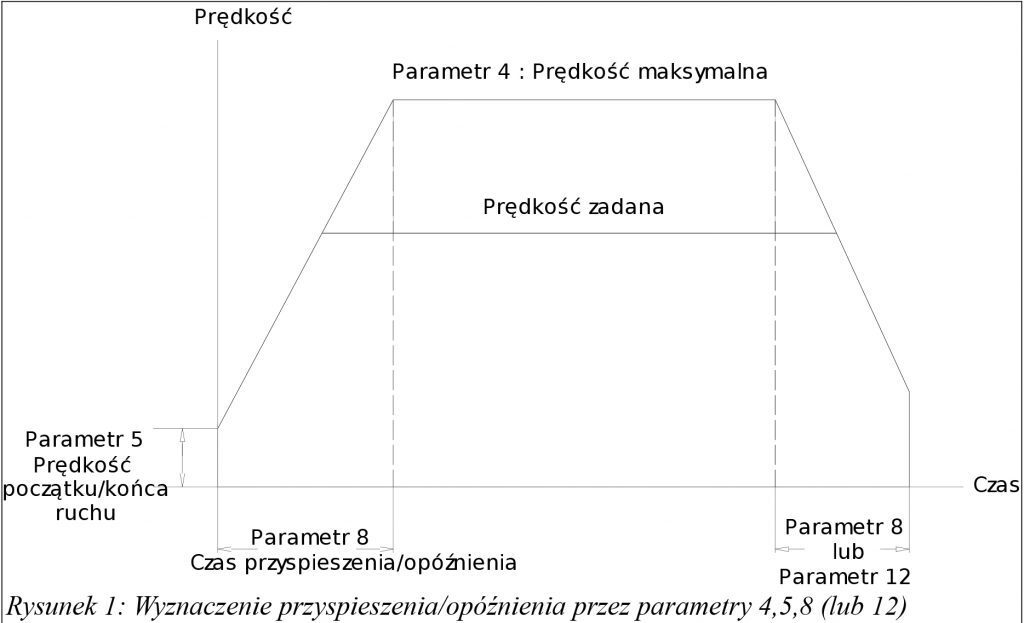
Parametr ten wraz z prędkością początku/końca ruchu oraz czasem przyspieszenia/opóźnienia definiuje przyspieszenia wykonywanych ruchów (Rysunek 1).
Parametr 5: Prędkość początku/końca ruchu, domyślnie 141.
Dla jednostek mieszanych i pulsów – pulsy/s [Hz]
Dla jednostek mechanicznych – cm/min, 10xDeg/min, cal/min, itp.
Parametr 6: Wykorzystywana przy bazowaniu, prędkość poruszania się na czujniku krańcowym.
Dla jednostek mieszanych i pulsów – pulsy/s [Hz]
Dla jednostek mechanicznych – cm/min, 10xDeg/min, cal/min, itp.
Parametr 7: Kompensacja luzów [w pulsach]. Domyślnie 0. (Nie używana przy interpolacji liniowej)
Błąd pozycjonowania spowodowany luzem, powstaje przy każdej zmianie kierunku ruch. Wartość kompensacji jest dodawana automatycznie do zadanego skoku, przy zmianie kierunku ruchu, dla wyeliminowania wpływu luzu.
Parametr 8: Czas przyspieszenia/opóźnienia [w ms]. Domyślnie 5000 (Nie używana przy interpolacji liniowej, gdzie obowiązuje Parametr 13)
Zakres : 0~30000ms
Parametr ten definiuje przyspieszenie, określając czas w jakim prędkość osiągnie wartość maksymalną (Parametr 4), startując od prędkości początku/końca (Parametr 5). Podobnie dla opóźnienia – określa czas w jakim prędkość osiągnie wartość początku/końca,startując od prędkości maksymalnej. Należy zwrócić uwagę, że wszystkie ruchy, niezależnie od zadanej prędkości, będą wykonywane z tak zdefiniowanym przyspieszeniem (tzn. czas przyspieszenia/ opóźnienia jest zawsze w odniesieniu do prędkości maksymalnej a nie
zadanej – patrz Rysunek 1).
Gdy Parametr 12 <>0 on brany jest jako czas opóźnienia a Parametr 8 jest wtedy tylko czasem przyspieszenia.
Parametr 9: Kierunek obrotów oraz kierunek bazowania. Domyślnie 0100Hex (Nie używany przy interpolacji liniowej):

Oba parametry kodowane są odpowiednio na starszym i młodszym bajcie jednego rejestru.
Parametr 9_0 (młodszy bajt) pozwala przez zmianę stanu bitu b0 na zmianę dodatniego kierunku obrotów.
Parametr 9_1 (starszy bajt) pozwala przez zmianę stanu bitu b9 na określenie kierunku poszukiwania czujnika referencji podczas bazowania.
Parametr 10: Kompensacja ruchu w kierunku dodatnim [w pulsach]. Domyślnie 0. (Nie używana przy interpolacji liniowej).
Zakres: −32768~32767 Pulsów.
Ilość pulsów automatycznie dodawana do zadanego dystansu, gdy ruch odbywa się w kierunku dodatnim.
Parametr 11: Kompensacja ruchu w kierunku ujemnym [w pulsach]. Domyślnie 0. (Nie używana przy interpolacji liniowej).
Zakres: −32768~32767 Pulsów.
Ilość pulsów automatycznie dodawana do zadanego dystansu, gdy ruch odbywa się w kierunku ujemnym.
Parametr 12: Czas opóźnienia [w ms]. Domyślnie 0. (Nie używana przy interpolacji liniowej, gdzie obowiązuje Parametr 13).
Zakres : 0~30000ms
Gdy parametr 12 jest równy zero – parametr 8 określa czas opóźnienia.
Gdy parametr 12 jest różny od zera – określa on czas opóźnienia.
Parametr ten definiuje opóźnienie, określając czas w jakim prędkość opadnie od wartość maksymalnej (Parametr 4), do prędkości początku/końca (Parametr 5) (patrz Rysunek 1).
Uwaga: Dla poprawnego działania, różnica między czasem przyspieszenia i opóźnienia nie może przekroczyć 2ms. W przeciwnym razie, w skrajnych przypadkach, ruch odbywać się będzie nazbyt długo (gdy Parametr 8>>Parametr 12) lub zakończy się natychmiastowym zatrzymaniem (bez opóźnienia) ( gdy Parametr 8<<Parametr 12).
