
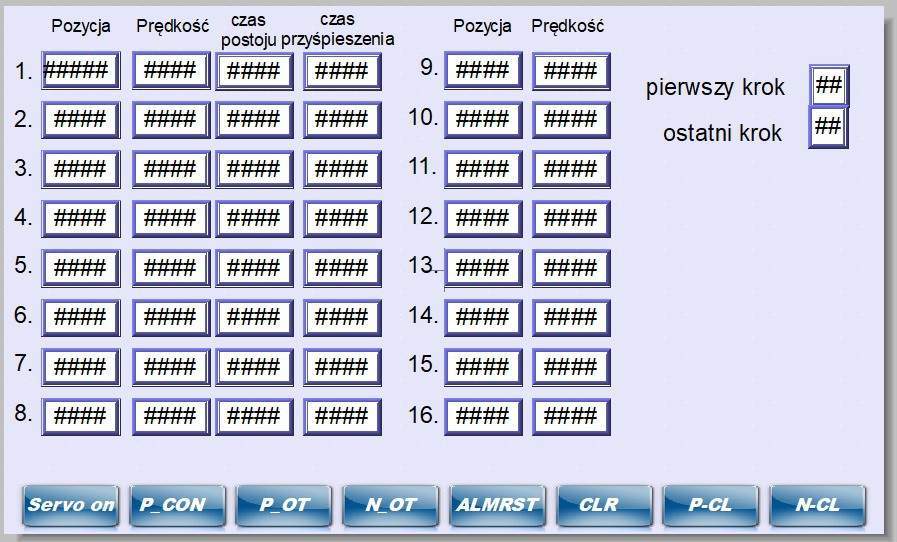
Serwonapęd stosowany jako autonomiczne rozwiązanie sterujące – dlaczego nie? Dzięki funkcji “pozycjonowanie na podstawie wewnętrznego pozycjonera” możemy wykorzystać Estuna w prostych maszynach z predefiniowanymi ruchami. Serwo pozwala nam zdefiniować 16 kolejnych kroków. Parametryzować możemy drogę, prędkość, przyśpieszenie, oraz czas postoju pomiędzy kolejnymi krokami, gdy wykonywane są automatycznie. Jeśli do napędu dołoży panel operatorski wartości te będziemy mogli zmieniać na bieżąco.
Pozycjonowanie na podstawie wewnętrznego pozycjonera
Jednym z wielu możliwych trybów pracy serwonapędów ESTUN jest pozycjonowanie na podstawie wewnętrznego pozycjonera. Tryb ten jest często pomijany lub po prostu niezauważany, dlatego przyjrzymy się mu nieco bliżej.
Do dyspozycji mamy 16 kroków, co przekłada się na 16 pozycji (dystansów) wraz z prędkościami ruchów i czasami przyspieszania/zwalniania oraz pauzy pomiędzy ruchami. Serwonapęd wykonuje kroki w kolejności od pierwszego do ostatniego. Ale wcale nie musimy i nie zawsze chcemy używać wszystkich szesnastu kroków – po prostu wskazujemy, który krok jest początkiem, a który krok jest ostatnim elementem sekwencji ruchów. Kolejnym ważnym parametrem jest sposób interpretacji – w opisie powyżej pojawiają się obok siebie słowa „pozycja” oraz „dystans”. W tym miejscu pojawia się wyjaśnienie: napęd może interpretować wartości z rejestrów w sposób inkrementalny lub absolutny. Jeśli wskażemy, żeby napęd pozycjonował się w sposób absolutny, oznacza to, że wartość z rejestru zostanie odczytana jako „jedź do pozycji”, natomiast w pozycjonowaniu inkrementalnym napęd odczyta to jako „przesuń się o dystans”. Ot, cała zagwozdka. Dla przykładu, jeśli w kroku pierwszym wpiszemy wartość „0”, to w trybie absolutnym napęd wykona ruch do pozycji „0 impulsów”, gdzie w trybie inkrementalnym byłaby to nic nie wnosząca komenda o treści „przesuń się o 0 impulsów”. Do ukończenia konfiguracji pozostało wybrać tryb zmiany i wywołania kroków. Kroki możemy wywoływać ze zwłoką czasową lub sygnałem P_CON. Możemy zdefiniować, że sekwencja wykona się tylko raz lub będzie powtarzana w kółko. Ten tryb sterowania zaopatruje nas również w procedurę bazowania. Po podaniu sygnału PCL lub NCL silnik zostanie zbazowany na odpowiadającym czujniku krańcowym: P_OT lub N_OT.
Gdy skonfigurowano serwonapęd Estun w tryb pracy, jako sterowanie z wewnętrznego pozycjonera (Pn005.1=C), za sposób sterowania wykonywaniem wewnętrznych kroków odpowiadają ustawienia podparametrów parametru Pn681. Ich opcje zostały przytoczone poniżej. Zachęcam do obejrzenia pełnego opisu trybu C.
Pn681.0 Tryb uruchamiania, sygnału startu i poszukiwania bazy
[0] Cykliczne uruchomienie, P-CL jako sygnał startu, N-CL jako sygnał poszukiwania bazy
[1] Pojedyncze uruchomienie, P-CL jako sygnał startu, N-CL jako sygnał poszukiwania bazy
Pn681.1 Tryb zmiany kroków
[0] Zmiana kroków przez opóźnienie czasowe, niepotrzebny sygnał startu, po załączeniu serwonapędu rozpocznij z opóźnieniem czasowym.
[1] P-CON zmienia kroki , niepotrzebny sygnał startu, po załączeniu serwonapędu P-CON stanowi sygnał startu; ale gdy wejście P-CON przejdzie w stan OFF, cykl nie zostaje zatrzymany.
[2] Zmiana kroków przez opóźnienie czasowe, wymagany sygnał startu, brak sygnału startu zatrzymuje cykl natychmiast, po ponownym podaniu sygnału startu rozpocznij cykl od pierwszego kroku.
[3] PCON zmienia kroki, wymagany sygnał startu, brak sygnału startu zatrzymuje cykl natychmiast, po ponownym podaniu sygnału startu rozpocznij cykl od pierwszego kroku..
Pn681.2 Działanie sygnału wywołania kroków
[0] przez poziom wysoki
[1] przez stan narastający
Wejścia dyskretne biorące udział w kontroli napędu w tym trybie
S-ON jako sygnał załączenia serwosilnika
P-CL jako sygnał startu
N-CL jako sygnał poszukiwania bazy
PCON zmienia kroki w trybie Pn681.1=1 i Pn681.1=3
Określanie pozycji, prędkości i przyspieszeń poszczególnych kroków pozycjonowania
Pn681.0-2– konfiguracja sposobu pracy pozycjonera
Pn682=0/1 0-programowanie inkrementalne, 1-programowanie absolutne
Parametrami Pn683 i Pn684 wybieramy pozycje, które będą występowały w typowym cyklu.
Pn683 – numer pierwszego kroku, numerowanie od 0
Pn684 – numer ostatniego kroku
Pn600-631 – pozycje (-9999~9999)
Każda pozycja jest wynikiem sumowania dwóch kolejnych składowych, zaczynając od Pn600 i Pn601(zerowa pozycja). Pierwsza składowa jest mnożona x10000P, a druga x1P. Należy pamiętać, że ważne w tym przypadku jest też ustawienie przekładni elektronicznej. Np. ustawiając Pn600=100 i Pn601=200 otrzymujemy pozycję równą:
100×10 000P+(100)x1P=10 00 z00 P – zaś ilość wykonanych obrotów przy tej drodze zależy od rodzaju enkodera i ustawienia przekładni elektronicznej.
Pn632-647 – prędkości (0~4500 rpm)
Ustawiana prędkość odnosi się bezpośrednio do ustalonej prędkości działania silnika i nie ma żadnego powiązania z przekładnią elektroniczną
Pn648-663 – ustawianie przyśpieszenia (jednostka 0.1 ms)
Pn664-679 – czas zatrzymania pomiędzy poszczególnymi ruchami (jednostka 50ms)
Połączenie z panelem operatorskim
Powyższy opis pozwala na stworzenie z serwonapędu urządzenia autonomicznego, które jest gotowe do pracy. Jednak gdybyśmy chcieli mieć możliwość zmiany parametrów pracy urządzenia w dowolnej chwili dobrym rozwiązaniem byłoby zastosowanie panelu HMI. Aby móc komunikować panel z serwonapędem będziemy korzystać z portu szeregowego na serwonapędzie RS 485 – znajduje się on na złączu CN3 i CN4 – odpowiednie piny są zmostkowane na tych złączach, według poniższego schematu:

Przewód z drugiej strony musimy podłączyć do panelu – rozpiskę pinów znajduje się w karcie instalacyjnej dla każdego panelu. Następnie musimy ustawić parametry komunikacji. Domyślne parametry to:
- Pn700.0=1 9600bps
- Pn700.1=5 8,O,1(MODBUS ASCII)
- Pn700.2=1 MODBUS SCI communication
- Pn701=1 – numer stacji w protokole Modbus
Takie same parametry musimy ustawić po stronie panelu Weintek w oprogramowaniu EasyBuilderPro:
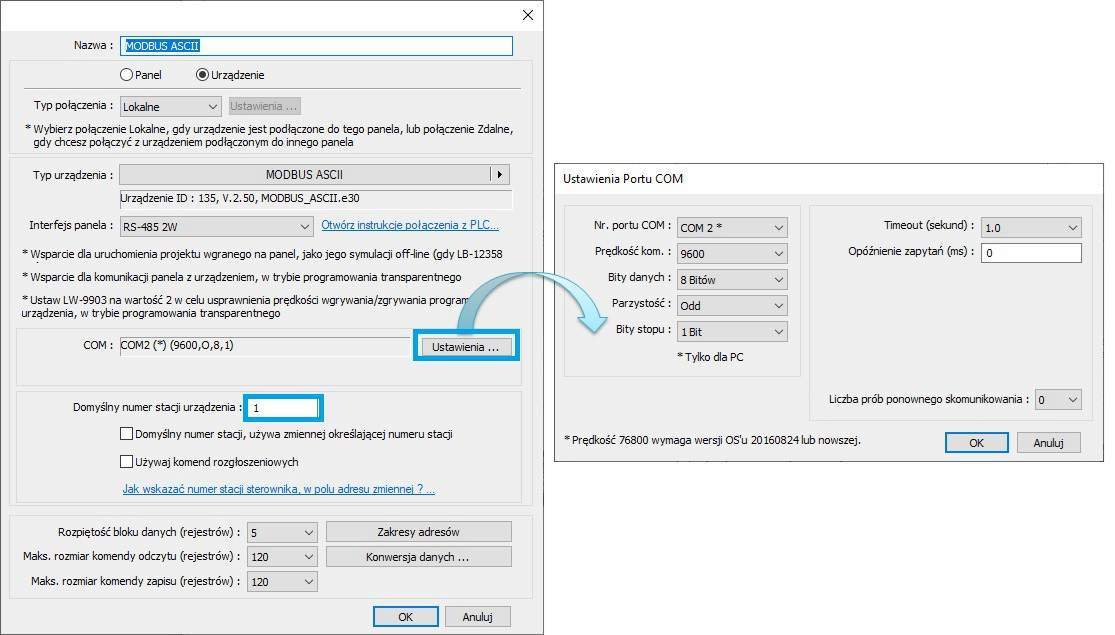
Po ustawieniu parametrów komunikacji przechodzimy do umieszczania obiektów pozwalających na edycję prędkości, drogi, przyśpieszenia i czasu postoju na ekranie. Użyjemy do tego obiektów numerycznych. Parametr PN600 będzie miał adres w modbusie 4×601, PN601 –> 4×602, jak łatwo zauważyć, aby odpytać dany parametr wystarczy wybrać funkcję 4x i do numeru parametru dodać wartość 1:
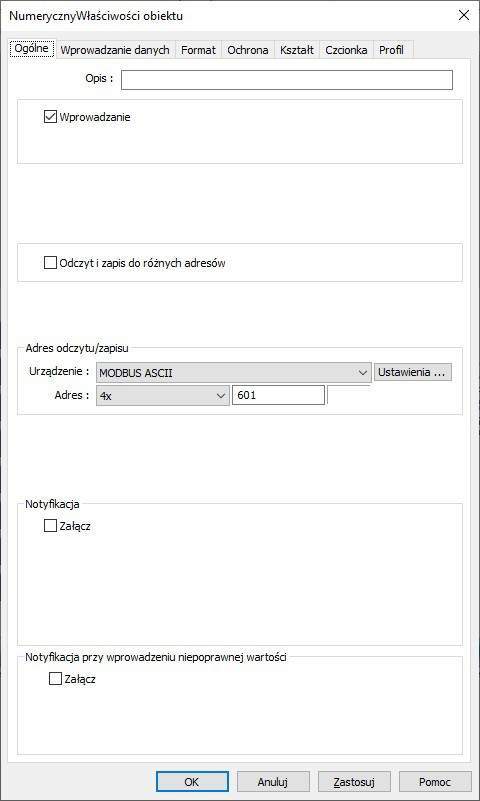
Inne parametry, które można odczytać zostały opisane w rozdziale Data Communication Address of Servo State w intrukcji obsługi. Podawane są one w hexie. Dlatego, aby odczytać taki parametr należy przeliczyć jego wartość na liczbę dziesiętną, a następnie dodać jeden, oraz wybrać kod funkcji 4x dla opcji Read/write oraz 3x dla opcji Read only. Wyjątkowym parametrem jest parametr 900H, który pozwala na sterownie wejściami napędu. To czy dane wejście jest sterowane z wejścia fizycznego, czy poprzez komunikację definiuje nam:
- Pn512 – wejścia 14, 15, 16 i 17 na złaczu CN1
- Pn513 – wejścia 39, 40, 41, 42 na złaczu CN1
Ustawiając poszczególne bity tych słów na wartość 1 ustawiamy sterowanie ich poprzez komunikację (nie zaleca się sterowania wszystkimi wejściami poprzez komunikację, w celach testowych może być to wygodne). Osiem pierwszych bitów słowa 900H odpowiada za 8 wejść napędu. Aby odwołać się do danego wejścia z panelu HMI musimy przeliczyć wartość 900H na wartość dziesiętną, czyli 2304 oraz dodać wartość 1, więc interesującym nas parametrem będzie 2305.Do wysterowania wyjścia użyjemy obiektu o nazwie przełącznik:
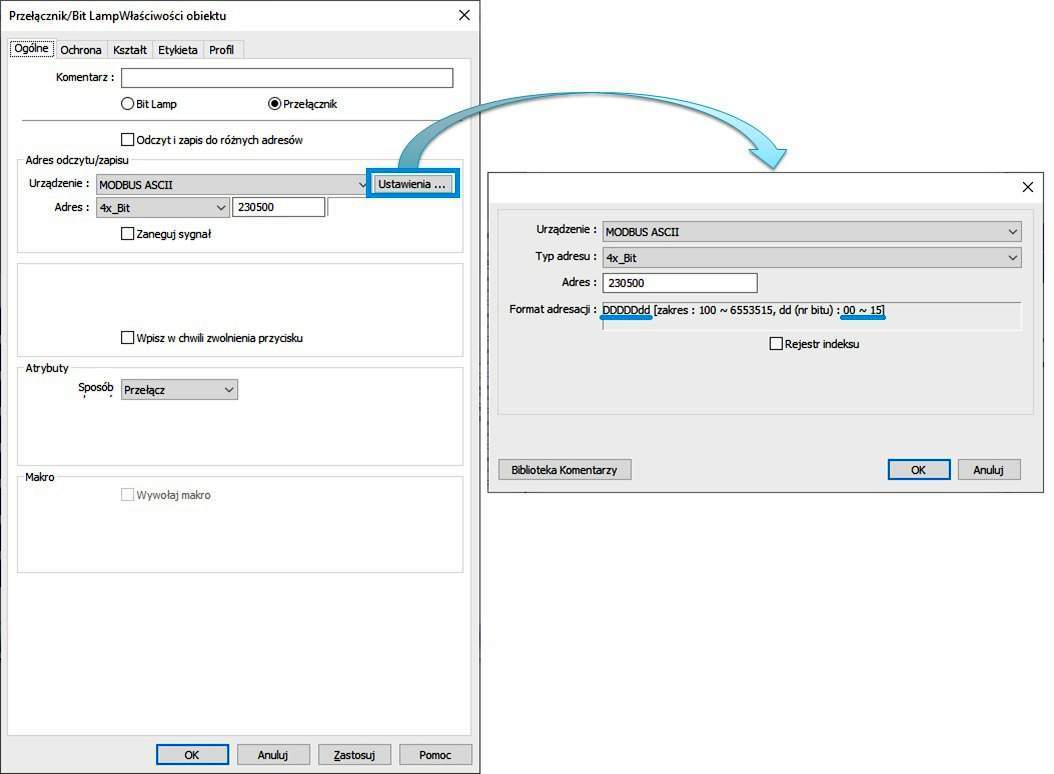
Jak zauważymy, dwie ostatnie cyfry (00~15) w adresie odwołują się do numeru bitu w słowie, którym chcemy sterować. Przykładowy program, może wyglądać następująco:
 | Autor: Jarosław PawełekAbsolwent Akademii Górniczo – Hutniczej im. Stanisława Staszica w Krakowie na kierunku Automatyka i Robotyka ze specjalnością Automatyka i Metrologia. Przygodę z automatyką rozpoczynał w firmie od stanowiska praktykanta. Przechodząc kolejno na stanowisko Doradcy ds. technicznych oraz obecnie zajmując stanowisko Kierownika Działu Wsparcia Technicznego stara się zapewniać najlepsze wsparcie merytoryczne dla naszych klientów. Prywatnie miłośnik fotografii. |