
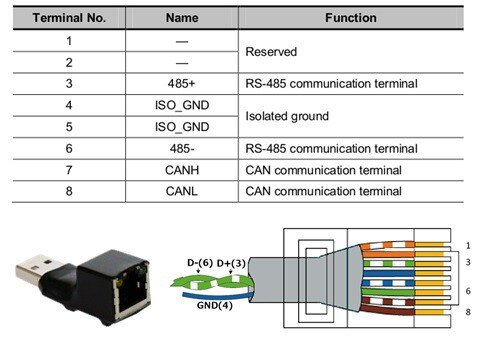
Parametry w napędzie Estun możemy ustawić z poziomu jego klawiatury. W sytuacji, gdy stosujemy powtarzalne parametry lub, gdy ilość parametrów do ustawienia jest większa – wygodniejszym rozwiązaniem staje się paramilitaryzacja poprzez oprogramowanie ESview. W tej części zajmiemy się połączeniem serwonapędu z oprogramowaniem ESview 3. W tym celu skorzystamy z konwertera KUSB, który podłączymy do złącza CN3 w napędzie. Rozkład sygnałów na złączu komunikacyjnym pokazano poniżej:
Aby połączyć się oprogramowaniem, musimy wiedzieć, na którym porcie COM zainstalował się nasz konwerter. Połączymy się domyślnymi nastawami prędkości 9600 bps. W tym celu będziemy postępować według przykładu pokazanego poniżej:
Możliwości oprogramowania opisaliśmy we wcześniejszym artykule. W tym wpisie pokażemy jak praktycznie wykorzystać wszystkie możliwości serwonapędów Estun.
Parametryzacja – w zakładce edit parametrs możemy odczytać parametry z napędu, naciskając przycisk Upload i zapisać je do niego za pomocą przycisku Download. Co więcej możemy również zapisać te parametry w celu dalszego wykorzystania na innym napędzie. Przycisk Restore pozwala przywrócić parametry fabryczne, zaś Parametre Compared na porównanie parametrów z pliku z tymi na urządzeniu. Miejsce na wpisanie tesktu pozwala na wygodne wyszukiwanie parametrów po frazie lub numerze. Zmienione parametry podświetlają się na zielono. Uwaga! Zmiana niektórych parametrów jest aktywna dopiero po ponownym uruchomieniu urządzenia.
W zakładce Control Mode i Reference Input możemy wybrać tryb sterowania serwonapędem i określić jak wygląda sygnał sterujący. Wybrane nastawy zapisują się do adekwatnych parametrów, po naciśnięciu przyciskiem Confrm. Uwaga! Zmiana trybu sterowania serwonapędem będzie aktywna dopiero po ponownym uruchomieniu urządzenia.
W zakładkach Digital Inputs i Digital Outputs możemy ustawić jak mają zachowywać się poszczególne wejścia/wyjścia napędu, oraz określić czy działają jako normalnie otwarte, czy normalnie zamknięte. Opis poszczególnych wejść/wyjść poniżej:
Wejścia:
S-ON – Servo ON – sygnał zezwolenia dla serwonapędu, jego działanie definiujemy w parametrze Pn000.0 =0 – sygnał wymagany, =1 – sygnał nie jest wymagany do uruchomienia napędu
P-OT (positive overtravel) – zabroniony ruch w przód Pn000.1 =0 – sygnał wymagany, =1 – sygnał nie jest wymagany do uruchomienia napędu
N-OT (negative overtravel) – zabroniony ruch w tył Pn000.2 =0 – sygnał wymagany, =1 – sygnał nie jest wymagany do uruchomienia napędu
P-CL – limit momentu ruchu w przód Pn403 [%] (w zależności od trybu sterowania, sygnał ten może mieć różne funkcje)
N-CL – limit momentu ruchu w tył tył Pn404 [%] (w zależności od trybu sterowania, sygnał ten może mieć różne funkcje)
P-CON- kontrola proporcjonalna (w zależności od trybu sterowania, sygnał ten może mieć różne funkcje)
ALM-RST – kasowanie alarmu
CLR – kasowanie błędu pozycji
SHOM – procedura bazowania (w trybie sterowania pozycji), sposób działania definiujemy w parametrze Pn689
ORG – osiągnięcie pozycji zerowej
Wyjścia:
/COIN lub (/V-CMP) – wykrywanie zgodności prędkości lub zakończenie pozycjonowania
/TGON – wykryto obroty silnika
/S-RDY – serwo gotowe do pracy
/CLT – wykrywanie limitu momentu
/BK – wyjście do zwalniania hamulca
/PGC – sygnał fazy C enkodera
/OT – wyjście zakresu – poza zakresem
/RD – serwo włączone – podana moc na silnik
/HOME – zakończenie bazowania
/TCR – wykrywanie limitu momentu
Jog – jest typem ruchu serwisowego. Pozwala na poruszenie silnikiem z pominięciem sygnałów zezwolenia i krańcówek układu.
Manualny Tunign – sprawdza się tam, gdzie zawodzi autotuning czasu rzeczywistego. Pozwala na dobranie optymalnych parametrów pracy układu i obserwowanie zmian na przebiegach. Dokładny opis ustawienia parametrów autotuningu czasu rzeczywistego opisano w instrukcji w rodziale “7. Dopasowanie regulatorów serwonapędu (tzw. tuning)”:
Zapraszamy do VI części kursu.
 | Autor: Jarosław PawełekAbsolwent Akademii Górniczo – Hutniczej im. Stanisława Staszica w Krakowie na kierunku Automatyka i Robotyka ze specjalnością Automatyka i Metrologia. Przygodę z automatyką rozpoczynał w firmie od stanowiska praktykanta. Przechodząc kolejno na stanowisko Doradcy ds. technicznych oraz obecnie zajmując stanowisko Kierownika Działu Wsparcia Technicznego stara się zapewniać najlepsze wsparcie merytoryczne dla naszych klientów. Prywatnie miłośnik fotografii. |
