
Gdy podłączyliśmy napęd i wykonaliśmy wstępne testy opisane w części I i II naszego kursu, możemy przejść do dalszych kroków. To czas na sterowanie serwonapędem Estun w trybie kontroli pozycji z zewnętrznego kontrolera.
Aby tego dokonać, należy wykonać 5 kroków:
1. Sterowanie serwonapędem – wybór sposobu
Parametr PN005.1 ustawić jako 1 – sterowanie za pomocą wejścia impulsowego.
2. Sterowanie serwonapędem impulsywne poprzez ustawienie parametru Pn004.2 – wybór rodzaju
W przypadku krok/kierunek, należy ustawić wartość na 0.
Dodatkowymi opcjami są:
[0] Krok + Kierunek
[1] CW+CCW CW + CCW
[2] A + B (×1)
[3] A + B (×2)
[4] A + B (×4)
3. Określenie przełożenia przekładni elektronicznej w parametrach Pn201 (licznik) i PN202 (mianownik) dla przekładni 16-bitowej. Przekładnia elektroniczna to iloraz dwóch liczb, przez który przemnożona zostanie ilość impulsów otrzymanych na wejściu serwonapędu. Umożliwia to osiągnięcie wysokich obrotów silnika przy niższych częstotliwościach sterowania.
Przykładowo, aby uzyskać 1 obrót wału silnika przy silniku z enkoderem inkrementalnym, na wejście należy wysłać 10 000 impulsów. Ustawiając parametry: Pn201=250, Pn202=9 – uzyskamy rozdzielczość ~360 pulsów na obrót. Oznacza to, że każdy fizyczny puls na wejściu będzie przemnożony przez iloraz [250/9], co zaowocuje obrotem wału silnika o ~1 stopień.
Możemy również użyć przekładni 32-bitowej, wtedy musimy ustawić parametr Pn009.2 = 1.

4. Ustawienie pozostałych parametrów w zależności od aplikacji:
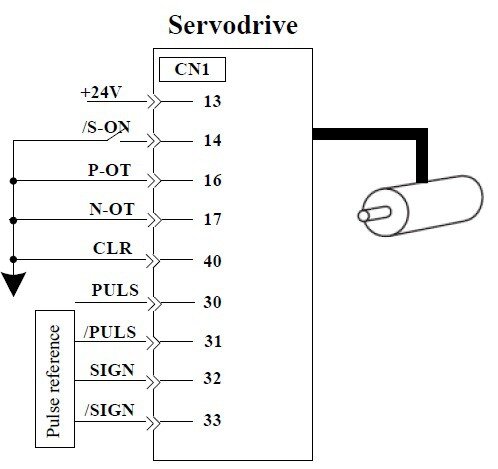
Pn000.0 – określa, czy do uruchomienia napędu jest wymagany zewnętrzny sygnał zezwolenia S-ON (jeśli równy 0) lub nie jest on wykorzystywany (jeśli równy 1)
Pn000.1 – wejścia Forward Run (ruch do przodu) zakazany (P-OT) – (jeśli równy 0 – sygnał używany), gdy na wejściu P-OT nie jest podawany sygnał (złącze normalnie zamknięte), silnik zostaje zatrzymany zgodnie z ustawieniami w parametrze Pn004.0, jeśli równy 1, sygnał jest ignorowany.
Pn000.2 – wejścia Reverse Run (ruch do tyłu) zakazany (N-OT) – (jeśli równy 0 – sygnał używany), gdy na wejściu N-OT nie jest podawany sygnał (złącze normalnie zamknięte), silnik zostaje zatrzymany zgodnie z ustawieniami w parametrze Pn004.0, jeśli równy 1, sygnał jest ignorowany.
Pn004.0 – sposób hamowania:
[0] hamowanie poprzez użycie dynamicznego hamulca, po zahamowaniu zwolnienie dynamicznego hamulca
[1] hamowanie przez rozbieg
[2] zatrzymanie poprzez hamulec dynamiczny, kiedy wyłączony zostaje sygnał S-ON, po najechaniu na czujnik krańcowy dynamiczne hamowanie i wyłączenie sygnału S-ON
[3] zatrzymanie poprzez rozbieg, kiedy wyłączony zostaje sygnał S-ON, po najechaniu na czujnik krańcowy dynamiczne hamowanie i wyłączenie sygnału S-ON
[4] zatrzymanie poprzez hamulec dynamiczny, kiedy wyłączony zostaje sygnał S-ON, po najechaniu na czujnik krańcowy dynamiczne hamowanie oraz wyłączenie sygnału S-ON i korzystanie z funkcji zero clamp
[5] zatrzymanie poprzez rozbieg, kiedy wyłączony zostaje sygnał S-ON, po najechaniu na czujnik krańcowy dynamiczne hamowanie oraz wyłączenie sygnału S-ON i korzystanie z funkcji zero clamp
Pn100.0 – parametry dotyczące autotuningu:
[0] Manualny tuning
[1,2,3] Oś pozioma
[4,5,6] Oś pionowa
[1,4] Bez zmiany inercji układu podczas pracy
[2,5] Z małą zmianą inercji układu podczas pracy
[3,6] Z dużą zmianą inercji układu podczas pracy
Pn100.1 – tryb tuningu
[0] Manualny
[1] Standardowe parametry
[2] Dla najlepszej stabilności układu
[3] Dla najlepszego pozycjonowania
Pn101 – sztywność napędu domyślnie równa 5. Im większa wartość tego parametru, tym napęd lepiej się pozycjonuje, ale również staje się bardziej niestabilny. Należy tutaj wybrać wartość poprzez kompromis, najbardziej optymalną dla danego układu

5. Po ustawieniu powyższych parametry, należy zresetować zasilanie napędu.
W tym momencie możemy podawać sygnał sterujący z zewnętrznego kontrolera np. sterownika Fatek. Jego konfigurację przedstawia poniższy film:
Zapraszamy do IV części kursu.
 |
Autor: Jarosław PawełekAbsolwent Akademii Górniczo – Hutniczej im. Stanisława Staszica w Krakowie na kierunku Automatyka i Robotyka ze specjalnością Automatyka i Metrologia. Przygodę z automatyką rozpoczynał w firmie od stanowiska praktykanta. Przechodząc kolejno na stanowisko Doradcy ds. technicznych oraz obecnie zajmując stanowisko Kierownika Działu Wsparcia Technicznego stara się zapewniać najlepsze wsparcie merytoryczne dla naszych klientów. Prywatnie miłośnik fotografii. |
