
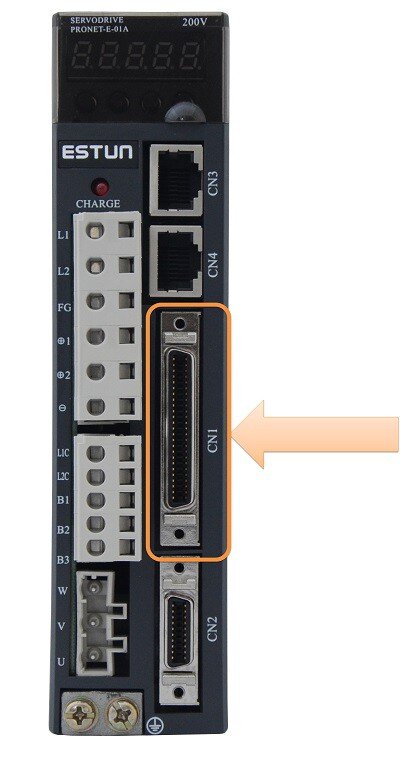
Po rozpakowaniu zestawu i podpięciu zasilania pozostaje nam jeszcze podpiąć sygnały sterujące. W zestawie otrzymujemy 50-pinową wtyczkę, do której musimy zalutować odpowiednie przewody. W tej części skupimy się na schematach podłączenia wejść/wyjść serwonapędu na złączu CN1. Jak się okaże, nie wszystkie wejścia/wyjścia będą nam zawsze potrzebne – w dużej mierze jest to uzależnione od wymagań aplikacji oraz trybu sterowania (poszczególne tryby sterowania zostaną omówione w dalszych częściach, tam również wymagane sygnały będą omówione bardziej szczegółowo).
Podłączenia wejść/wyjść serwonapędu
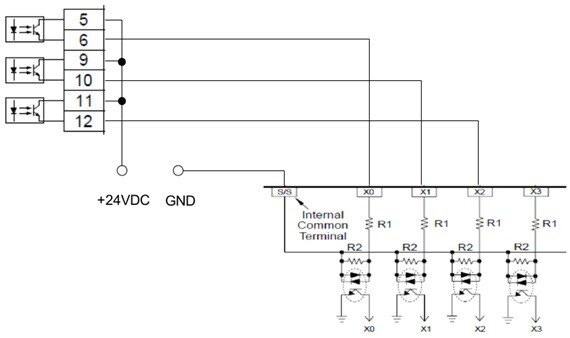
- Wejścia w napędach Estun
Wyjścia mają uniwersalną logikę, możemy je podpiąć zarówno jako NPN jak i PNP, co pokażemy na podstawie podłączenia ze sterownikiem Fatek:
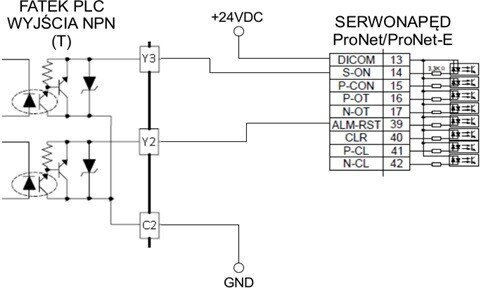
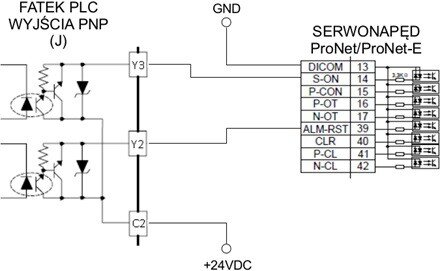
Jak widać na powyższych schematach, złącze DICOM (pin 13 złącza CN1) jest złączem wspólnym dla wejść. Serwonapęd Pronet posiada 8 konfigurowalnych wejść cyfrowych. Konfigurowanie wejść dyskretnych odbywa się w parametrach Pn509 oraz Pn510. Poniżej opisano funkcję poszczególnych sygnałów:
S-ON – Servo ON – sygnał zezwolenia dla serwonapędu, jego działanie definiujemy w parametrze Pn000.0 =0 – sygnał wymagany, =1 – sygnał nie jest wymagany do uruchomienia napędu
P-OT (positive overtravel) – zabroniony ruch w przód Pn000.1 =0 – sygnał wymagany, =1 – sygnał nie jest wymagany do uruchomienia napędu
N-OT (negative overtravel) – zabroniony ruch w tył Pn000.2 =0 – sygnał wymagany, =1 – sygnał nie jest wymagany do uruchomienia napędu
P-CL – limit momentu ruchu w przód Pn403 [%] (w zależności od trybu sterowania, sygnał ten może mieć różne funkcje)
N-CL – limit momentu ruchu w tył Pn404 [%] (w zależności od trybu sterowania, sygnał ten może mieć różne funkcje)
P-CON- kontrola proporcjonalna (w zależności od trybu sterowania, sygnał ten może mieć różne funkcje)
ALM-RST – kasowanie alarmu
CLR – kasowanie błędu pozycji
SHOM – procedura bazowania (w trybie sterowania pozycji), sposób działania definiujemy w parametrze Pn689
ORG – osiągnięcie pozycji zerowej
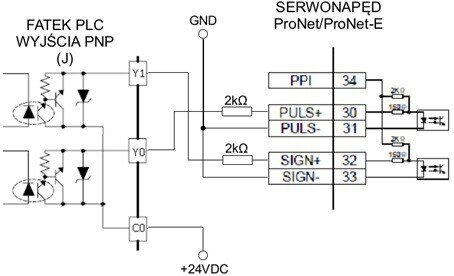
- Wyjścia z napędów Estun
Również wyjścia możemy podpiąć jako NPN jak i PNP, co również przedstawimy na podstawie podłączenia ze sterownikiem Fatek.
Podłączenie wyjść napędu ProNet do wejść sterownika Fatek – wejścia sterownika reagujące na podanie masy (NPN):
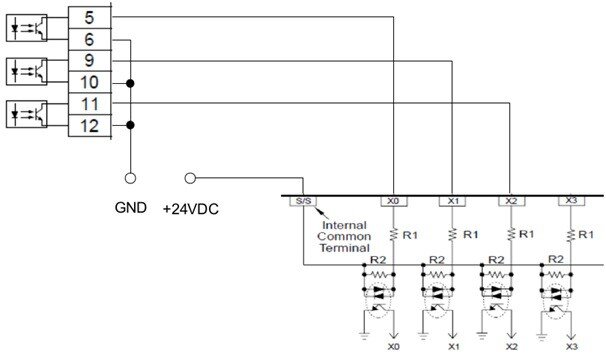
Podłączenie wyjść napędu ProNet do wejść sterownika Fatek – wejścia sterownika reagujące na podanie potencjału dodatniego (PNP):
Konfigurowanie wyjść dyskretnych odbywa się w parametrze Pn511. Funkcję poszczególnych wyjść opisano poniżej:
/COIN lub (/V-CMP) – wykrywanie zgodności prędkości lub zakończenie pozycjonowania
/TGON – wykryto obroty silnika
/S-RDY – serwo gotowe do pracy
/CLT – wykrywanie limitu momentu
/BK – wyjście do zwalniania hamulca
/PGC – sygnał fazy C enkodera wyjście zakresu – poza zakresem
/RD – serwo włączone – podana moc na silnik
/HOME – zakończenie bazowania
/TCR – wykrywanie limitu momentu
- Wejścia analogowe – tryb kontroli prędkości lub/i momentu
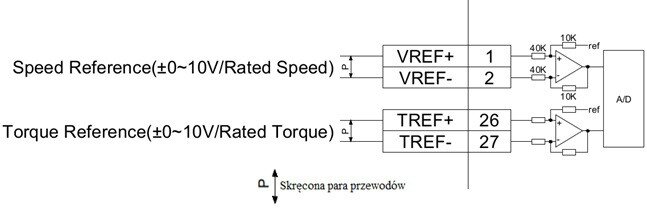
VREF+ / – wejście analogowe do sterowania prędkością
TREF+ / – wejście analogowe do sterowania momentem
Podawane sygnały muszą być w zakresie ±10V DC.
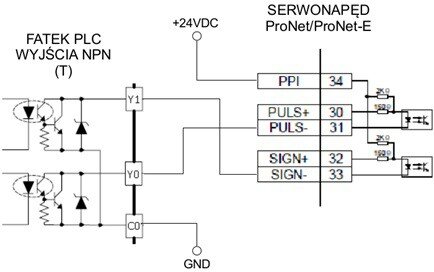
- Wejścia impulsowe
Wejścia impulsowe wykorzystywane są do sterowania pozycją.
– sterowanie sygnałami różnicowymi – max. częstotliwość: 4MHz
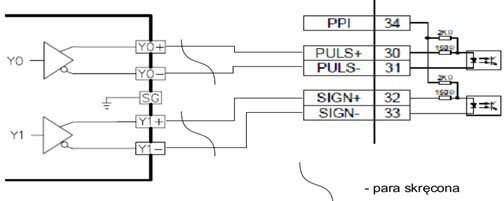
– sterowanie „Open collector” – max. częstotliwość: 200kHz
Jak zostało wspomniane na początku przewody należy zalutować do załączonej w zestawie 50 pinowej wtyczki. Istnieje również prostsze rozwiązanie, gdzie poszczególne piny złącza CN1 są wyprowadzone na złącza śrubowe – Konwerter CV50.

Zapraszamy do III części kursu.
 | Autor: Jarosław PawełekAbsolwent Akademii Górniczo – Hutniczej im. Stanisława Staszica w Krakowie na kierunku Automatyka i Robotyka ze specjalnością Automatyka i Metrologia. Przygodę z automatyką rozpoczynał w firmie od stanowiska praktykanta. Przechodząc kolejno na stanowisko Doradcy ds. technicznych oraz obecnie zajmując stanowisko Kierownika Działu Wsparcia Technicznego stara się zapewniać najlepsze wsparcie merytoryczne dla naszych klientów. Prywatnie miłośnik fotografii. |
