
Przed podłączeniem serwonapędu do zasilania
Kupiłeś zestaw, w którego skład wchodzi napęd, silnik, kable, niezbędne konektory i zastanawiasz się, co dalej? Przed pierwszy uruchomieniem napędu upewnij się, że wszystkie przewody zostały prawidłowo podłączone, a następnie wykonaj trzy operacje testowe opisane w dalszej części.
Instrukcje są podane dla trybu sterowania prędkością (ustawienie standardowe) i pozycją. Jeśli nie ustawiłeś innych parametrów, używane są standardowe dla trybu sterowania prędkością (ustawienia fabryczne). Przed podłączeniem serwonapędu do zasilania należy sprawdzić znamionowe napięcie zasilania serwonapędu Estun – informacje te możesz znaleźć na tabliczce znamionowej.
Zasilanie z jednej fazy – 230 VAC:
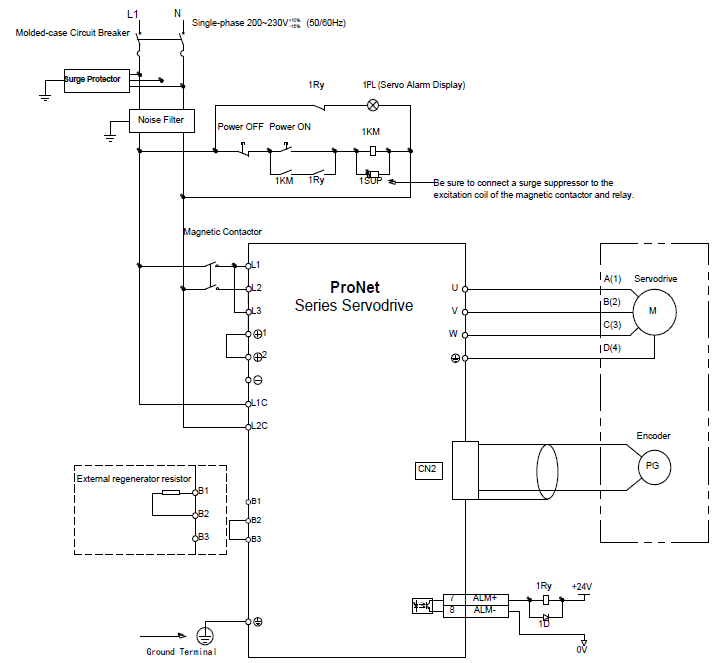
Powyższe połączenia polega na tym, że:
– między L1 i L2, pojawia się napięcie 230V
– podobnie pomiędzy L2 i L3
– natomiast pomiędzy L1 i L3 napięcie jest zerowe, gdyż do obu tych punktów wpięty jest ten sam przewód fazowy. Czyli nigdzie nie podajemy napięcia wyższego niż 230V, jednocześnie zasilając dwa mostki napędu.
Zasilanie z 3 faz – 400VAC:
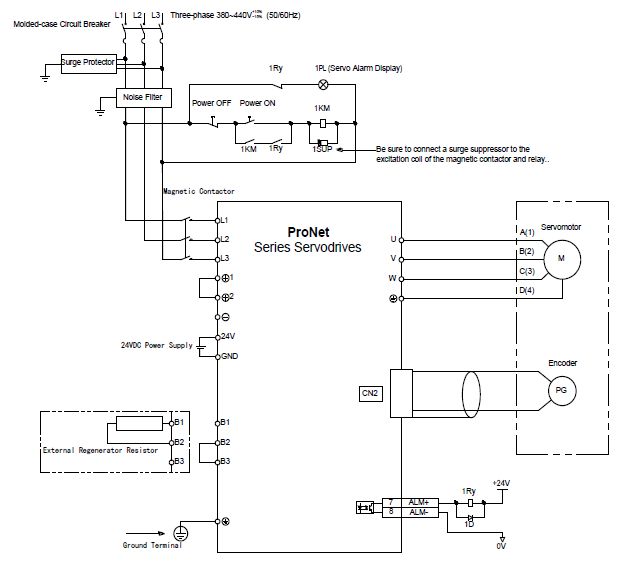 Po poprawnym zasileniu napędu możemy wykonać kolejne kroki testowe.
Po poprawnym zasileniu napędu możemy wykonać kolejne kroki testowe.
Kroki testowe
Część 1
Serwomotor pracuje bez podłączania wału do maszyny. Należy sprawdzić, czy poniższe obwody są prawidłowo podłączone, oraz jakie jest ustawienie parametrów:
- Obwód zasilania
- Obwód silnika
- Obwód enkodera
- Kierunek obrotów i prędkość silnika.
Wykonaj kroki 1 do 4.
Część 2
Serwomotor nadal pracuje bez podłączania wału do maszyny. Należy sprawdzić, czy poniższe obwody są prawidłowo podłączone, oraz jakie jest ustawienie parametrów:
- Sprawdź obwody pomiędzy wejściami/wyjściami na serwonapędzie a nadrzędnym kontrolerem ruchu
- Sprawdź kierunek obrotów, prędkość obrotową serwomotoru w zależności od sygnału sterującego
- Sprawdź działanie hamulca (jeśli silnik go posiada), krańcówek i innych funkcji ochronnych
Wykonaj kroki 5 do 8.
Część 3
Wykonaj próbny ruch przy silniku podłączonym do maszyny. Ustaw następujące parametry:
- Prędkość serwomechanizmu i odległość przemieszczania maszyny w zależności od obrotu silnika.
- Ustaw wymagane parametry w zależności od trybu sterowania.
Wykonaj kroki 9 do 11.
| 1 | Zamontować serwomotor i napęd serwo zgodnie z warunkami instalacji. (Nie podłączać silnika do maszyny, ponieważ serwomotor będzie pracował najpierw bez obciążenia). |
| 2 | Podłączyć obwód zasilania (L1, L2 i L3), okablowanie serwosilnika (U, V, W), okablowanie sygnału we / wy (CN1) i okablowanie enkodera (CN2). Podczas wykonywsnia części 1 (próby działania serwomotora bez obciążenia) odłączyć złącze CN1. |
| 3 | Włączyć zasilanie. Użyj panelu, aby upewnić się, że napęd serwo działa prawidłowo. Jeśli używasz silnika wyposażonego w enkoder absolutny, wykonaj konfigurację dla enkodera absolutnego. |
| 4 | Wykonać operację JOG z silnikiem bez obciążenia. |
| 5 | Podłączyć sygnały wejściowe (CN1) konieczne do sterowania serwonapędem. |
| 6 | Użyć funkcji monitorowania, aby sprawdzić sygnały wejściowe. Włącz zasilanie i sprawdź poprawność działania wyłącznika awaryjnego, hamulca, krańcówek i innych funkcji ochronnych. |
| 7 | Włączyć sygnał Servo-ON. |
| 8 | Należy podać sygnał sterujący i obserwować, czy silnik wykonuje prawidłowy ruch. |
| 9 | Wyłączyć zasilanie i podłączyć silnik do maszyny. Jeśli używasz serwomotoru wyposażonego w enkoder absolutny, skonfiguruj enkoder absolutny i ustawienia początkowe dla nadrzędnego kontrolera w taki sposób, aby odpowiadał pozycji zerowej maszyny. |
| 10 | Stosując tę samą procedurę, jak w kroku 8, należy obsługując serwonapęd za pomocą zewnętrznego kontrolera ustawić parametry, upewnić się, że kierunek jazdy, zadana odległość i prędkość są poprawnie ustawione. |
| 11 | Serwomotor jest gotowy do pracy. Ustaw parametry dla regulatora PID lub korzystaj z autotuningu czasu rzeczywistego. |
Zapraszamy do II części kursu.
 | Autor: Jarosław PawełekAbsolwent Akademii Górniczo – Hutniczej im. Stanisława Staszica w Krakowie na kierunku Automatyka i Robotyka ze specjalnością Automatyka i Metrologia. Przygodę z automatyką rozpoczynał w firmie od stanowiska praktykanta. Przechodząc kolejno na stanowisko Doradcy ds. technicznych oraz obecnie zajmując stanowisko Kierownika Działu Wsparcia Technicznego stara się zapewniać najlepsze wsparcie merytoryczne dla naszych klientów. Prywatnie miłośnik fotografii. |
